
 首页
首页 登录
登录 注册
注册





HTML
-
The search for exact solutions to the time-dependent Schrödinger equation has garnered significant interest since the beginning of quantum mechanics. Today, it continues to play a crucial role in various quantum tasks that demand precise control. In particular, the exact evolution of a two-level system under external driving has attracted considerable attention, as it enables accurate qubit control in quantum information processing. Since a time-dependent Hamiltonian is non-commutative with respect to different times, achieving arbitrary target evolution for a qubit poses a significant challenge. Consequently, exact solutions are typically found only for specific cases, such as the Landau–Zener transition,[1,2] Rabi problems,[3] and quantum control using the hyperbolic secant pulse.[4]
Currently, the pursuit of exact dynamics or time-dependent unitary evolutions continues to attract significant attention, as it fundamentally addresses the challenges associated with the lack of precise quantum control. This is particularly relevant in both theoretical research and the experimental realization of quantum control and quantum computation. The primary obstacles include the quench effect, leakage associated with control pulses, and crosstalk among qubits.[5–9]
Recently, different schemes for exact quantum dynamics have been proposed.[10–25] Notably, an exactly solvable model for a two-level quantum system under a single-axis driving field has been proposed,[26] enabling the analytical design of certain types of quantum manipulations.[27–30] However, analytical solutions for more general cases remain elusive. Besides, previous solutions also have limitations regarding systematic parameters; for instance, the initial conditions of the pulse shape complicate the design of the target evolution operators. Furthermore, obtaining exact dynamics becomes challenging when the driving pulse includes a time-dependent phase in its off-diagonal terms. These limitations hinder the extension of the method to large-scale or long-time quantum control.
Here, we present an analytically assisted scheme for a general time-dependent Hamiltonian of a qubit under driving, capable of generating nearly infinite analytical solutions for its arbitrary dynamics. An arbitrary target evolution under this non-commutative Hamiltonian can be achieved as long as the Hamiltonian can be expressed as a functional of a dimensionless auxiliary function. Notably, these solutions can reduce to well-known analytical solutions, such as those for Rabi problems and the Landau–Zener transition, with specific choices of the auxiliary functions.
Furthermore, we demonstrate the application of our solution in two typical problems. First, we achieve exact quantum dynamics with smooth pulses when manipulating a singlet–triplet (ST) qubit in semiconductor quantum dot systems,[31] effectively avoiding the discontinuities in pulse shapes encountered in previous schemes. Second, we implement individual control in multi-level quantum systems with nearby transitions.[5] Our analytically assisted solution allows for the design of the Rabi frequency without the constraint of pulse area, enabling us to achieve two desired evolutions in both subspaces with a single pulse. Thus, our scheme offers an analytical-based approach for precise quantum control.
The rest of this work is organized as follows. In Subsections 2.1 and 2.2, we present our scheme and its theoretical derivation in detail, focusing on two different control directions within the qubit Hamiltonian. Subsection 2.3 discusses specific applications and their corresponding analytical dynamics. Subsequently, in Section 3, we address two applications, i.e., tackling the quench problem in experiments and mitigating the leakage of control pulses in multi-level systems. Finally, Section 4 provides a brief conclusion of this work.
-
In this section, we present our scheme for exactly arbitrary dynamics of the qubit system under different driving directions.
-
It is well known that the dipole-interacting Hamiltonian for a two-level quantum system, under time-dependent driving and after applying the rotating wave approximation, can generally be expressed as (assuming ℏ = 1)
where Ω(t) and φ(t) label the amplitude and phase of the driven pulse, Δ(t) is the detuning between the frequency of the driven pulse and the energy frequency of a qubit. Its time evolution operator, respected to the unitary condition, can be written as
where |u11|2+|u21|2 = 1.
The first thing we need to consider is how to analyze the entire evolution in the form of algebraic equations, as solving the matrix equations can be quite challenging. To address this, we first rotate the entire system into a specific representation, which yields the Schrödinger equation for the evolution operator as
where the transformation operator S(t) is defined as
Then, we will convert the matrix equations into algebraic equations for the elements of the evolution operator in Eq. (4). To begin, we will introduce their new definitions
Then, we rewrite the matrix form of the Schrödinger equation as two algebraic equations
where
Next, we separate this equation into two distinct equations as
where κ(t) is an unknown complex parameter introduced to satisfy the combined equation. Then, we obtain a general solution for v11 and v21 as
where α1 and α2 are constants. These constant phases arise from the derivation operation and are unknown yet.
Finally, we deal with these important parameters. Substituting Eq. (8) into Eq. (6), we can express α(t) in terms of κ(t) as
where θ = θ1–θ2. Since Δ and φ need to be real, α(t), defined in terms of them, also needs to be real. With this consideration, we can separate the complex function κ(t) into its real and imaginary parts, labeling them as κR(t) and κI(t). This allows us to separate the right side of Eq. (9) into its real and imaginary components. Furthermore, considering the restriction that α(t) is real, it ensures that the right side of Eq. (9) contains no imaginary terms. Thus, we get
Furthermore, we can obtain the derivative form of this equation as follows:
Generally, this parametric equation cannot be solved analytically. However, it is not necessary to do so if the goal is to obtain the evolution operator. By defining a dimensionless function
To achieve the above goal, we need to parameterize κ(t) as the function of χ(t). Since κI(t) has already parameterized by χ(t), we only need to deal with κR(t). This parameterize is achieved by treating Eq. (11) as a differential equation for κR(t) and κI(t). And, they are parameterized as
where C is an undetermined constant that comes from the integral operation of Eq. (11), which will be discussed and determined later. Since we have parameterized κ(t) as a function of χ, the relationship between the elements of the evolution operator and χ has already been established. Introducing ζ(t) = χ(t) + C for clarity, the elements of the evolution operator, u11 and u21, can be calculated and expressed as functions of ζ(t) as
where the parameter
where
Note that the uncertain phases θ1 and θ2 cancel each other out in the final evolution operator U(t). This is reasonable, as the final solution should not contain any unknown parameters.
Then, we will determine the corresponding Hamiltonian parameterized by χ(t). Recalling the definition of α(t), we could get
Note that ζ(t) is limited to avoid the divergence of the terms
-
Controlling the transverse σz term typically requires more precise control over the frequency of the driving pulse, which is generally more challenging than controlling the longitudinal σx/y term. Hence, we present the analytical-assisted solution under σx/y control. In this case, to distinguish from Eq. (1), we denote the general Hamiltonian as
This Hamiltonian is indeed equivalent to the Hamiltonian in Eq. (1). The main difference between them lies in the controllable elements. In Eq. (1), we assume control over the σz components to achieve a universal gate set, a scenario commonly found in ST qubit systems.[31–33] Conversely, the method of controlling over σx/y components to realize the universality is more prevalent in quantum computation systems.[34–37] It is important to note that the solution we have obtained thus far only permits control over the σz components for implementing a universal gate set, while control over the σx/y components remains restricted. To address this, we introduce a transformation to convert this off-diagonal controllable Hamiltonian into a diagonal controllable one, which is solvable as shown in the previous subsection. The transformation is
then the Hamiltonian in Eq. (17) is changed to
Now, since Ω′(t) is arbitrary, comparing with the Hamiltonian in Eq. (1), the evolution operator can be obtained by treating
where U′(t) is the evolution operator with respect to the Hamiltonian in Eq. (19), which can be obtained according to the σz control case. And, the controllable off diagonal part in Eq. (17) can be expressed as
with
-
As the final result, we write the evolution operator in Eq. (15),
where
with
Then, we will demonstrate that analytically-assisted solutions can reduce to the well-known analytical solutions of the Schdöinger equation. The dynamics for Landau–Zener transition, such as a ground state is driven through the anti-crossing produced by σx and ultimately returns with probability 1, could be reproduced. In the analytical-assisted solution, considering a ground state at t = 0, the probability for the system to be in the ground state at other time can be calculated by Eq. (15), i.e., |U11(t)|2. If we choose the auxiliary function ζ(t) to meet the condition
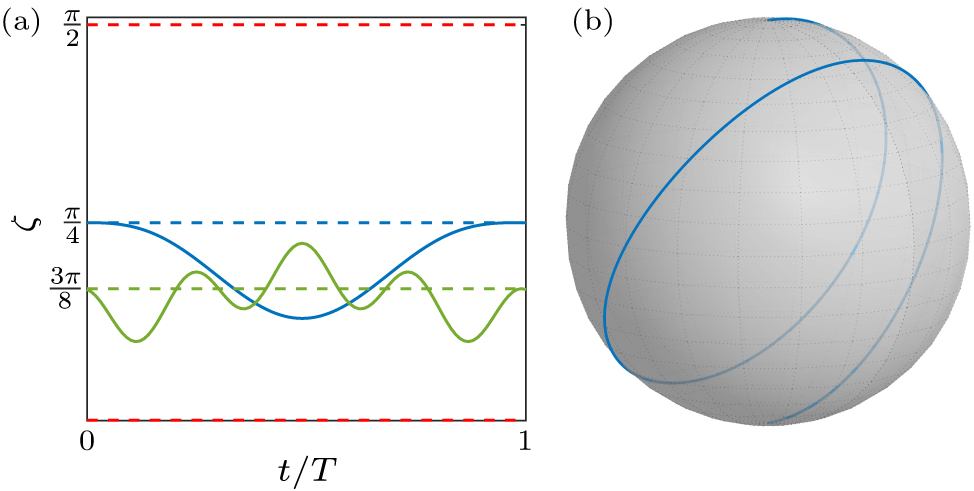
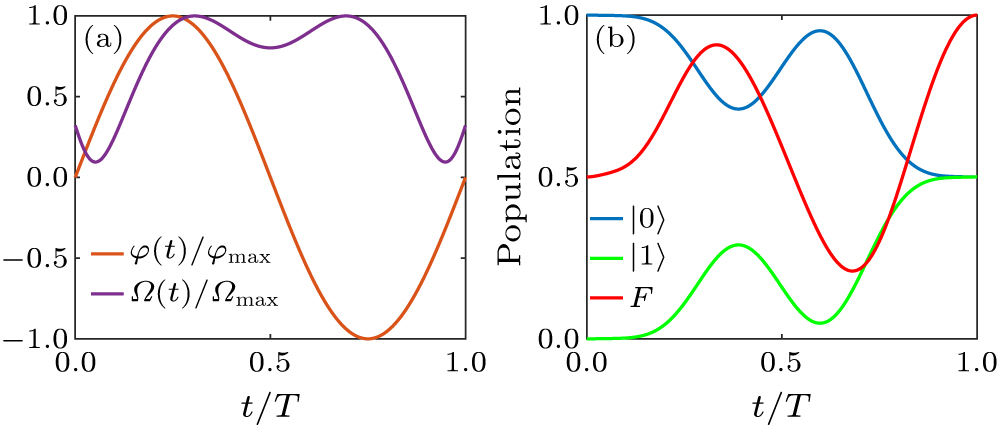
Therefore, as a direct application of the solutions, considering an uncontrollable and inevitable time-dependent or time-independent function in the σx/y/z part, achieving a desired two-level evolution can still be accomplished through the analytical-assisted solutions. For instance, if the σz part of the Hamiltonian contains an uncontrollable and time-dependent term Δ(t), it is still possible to derive the desired evolution operator as in Eq. (15) by designing only one function, ζ(t). Further, the Hamiltonian in other part is also determined since they depend on ζ(t) and Δ(t) according to Eq. (16). Moreover, we show more examples with different ζ(t). It is worth noting that different choices of the parameter ζ(t) lead to various evolution operators. However, the most common types of evolution operators can typically be obtained under the simpler condition ζ(0) = ζ(t), which makes it easier to determine and calculate other parameters. Thus, we set ζ(0) = ζ(t) and express ζ(0) using a trigonometric series for convenience. Specifically, we set
where An is a constant, and the trigonometric series are involved to satisfy ζ(0) = ζ(t). Two examples are shown in Fig. 1, with the boundary conditions of ζ(t) to respect population exchange gates and Hadamard like gates, with parameter sets of {A0,A1,A2,A3} = {π/4, 0, 0, −0.38} and {A0, A1, A2, a2, A3, a3} = {3π/8, 0, −0.22, 4, 0.18, 1}, respectively. And the ζ(t) function is plotted in Fig. 1(a). In Fig. 1(b), we show an evolution path of the NOT gate by further setting Δ = 2π MHz and T = 0.69 μs. Similar to σxy control, we design a Hadamard gate when assuming there exists a harmful constant detuning Δ′ = 2π MHz and the time-dependent phase φ(t) = sin(2πt/T), as shown in Fig. 2. The Hadamard gate can be obtain when the parameters of ζ(t) are {A0, A1, a1} = {π/8, 0.26, 1} and time T = 0.66 μs. The fidelity of the state |ψ(t)〉 is defined as F(t) = |〈Ψ|ψ(t)〉|2, where |Ψ〉 labels the ideal target state.
2.1. Solutions with the σz control
2.2. Transformation for σxy control
2.3. Results and dynamics
-
In this section, we demonstrate that the analytical solution can be utilized to implement universal gates with smooth pulses, which are well-suited for experimental setups.
-
The Hamiltonian for ST qubit in semiconductor double quantum dot systems[31–33] is
with the qubit basis
We demonstrate that the smooth pulses can be achieved using the analytical-assisted solution. The Hamiltonian in Eqs. (25) and (16) suggests that the time-dependent σz control scheme is suitable for the ST qubit system. Since h is time-independent and φ = 0, we obtain the expression of J(t) as a functional of ζ(t) as
Note that, the evolution operator in Eq. (14) does not depend on
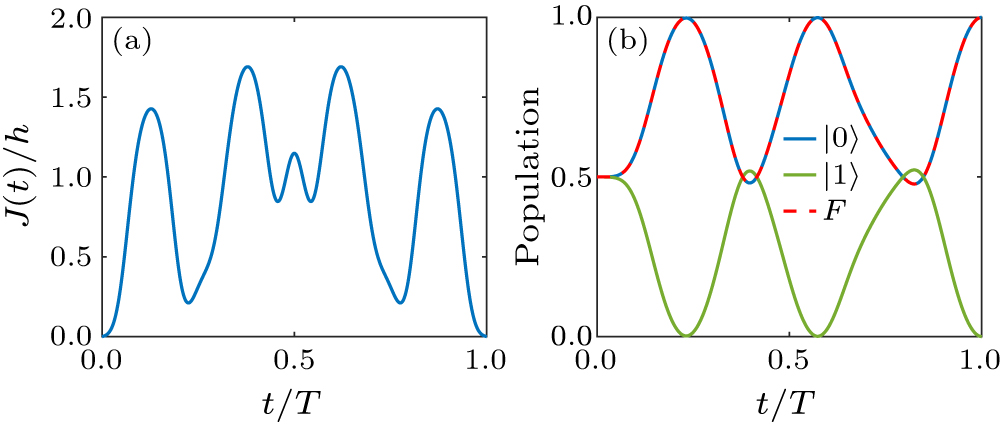
As demonstrations, we show how to construct Hadamard (H) gate and S gate, which are the generators of the group of 24 Clifford gate operations. To achieve smooth pulses, we set the value of the time-dependent J(t) to be zero at the start and end points for both gates. For the H gate, the π rotation around the x + z axis, we choose the boundary condition of ζ(0) = ζ(t) = 3π/8, numerically solve the equations to ensure ξ± = π/2. As a specific example, we choose the trigonometric series of ζ(t) in Eq. (24) as
with parameters {A0, A1, A2, a2, A3, a3} = {3π/8, 0, −0.22, 4, 0.18, 1}. Under these settings, a H gate is implemented. The pulse shape of J(t)/h, the corresponding state population and the gate-fidelity dynamics of this case are shown in Fig. 3.
Besides, to realize the S gate, or any other phase gates, the decomposition in the ST qubit system is
where R(σz/x,ξ) describes a rotation around axis σz/σx in the Bloch sphere. To obtain this phase gate, an arbitrary rotation around the axis σx is needed. According to Eq. (24), it could be realized by setting ζ(t) according to Eq. (24) as
The parameter ξ could be solved numerically to satisfy ξ = π/4 or ξ = π/8 to implement S or T gate, respectively. As an example, we could set the parameters {A0,A1,A2,A3,a3} = {π/4,0,0,0.24,1} to perform R(σx,ξ = π/4). By combining this gate with two H gates, we obtain an S gate. Since the compositions of H and S gates can generate all 24 Clifford gates, any RB process can be realized using only smooth pulse gates.
-
In many quantum control systems, there are numerous nearby transitions with comparable frequencies. Consequently, when implementing a desired manipulation on a target transition, there will inevitably be leakage to nearby transitions with different detuning. This is also the case for some qubit systems, such as NV-center systems,[34] trapped ions,[35] and molecular systems.[36] We here show an example of individual control over two nearby transitions by using our analytical-assisted solution, and the corresponding energy level structure is presented in Fig. 4(a). This driving Hamiltonian on both transitions could be written as
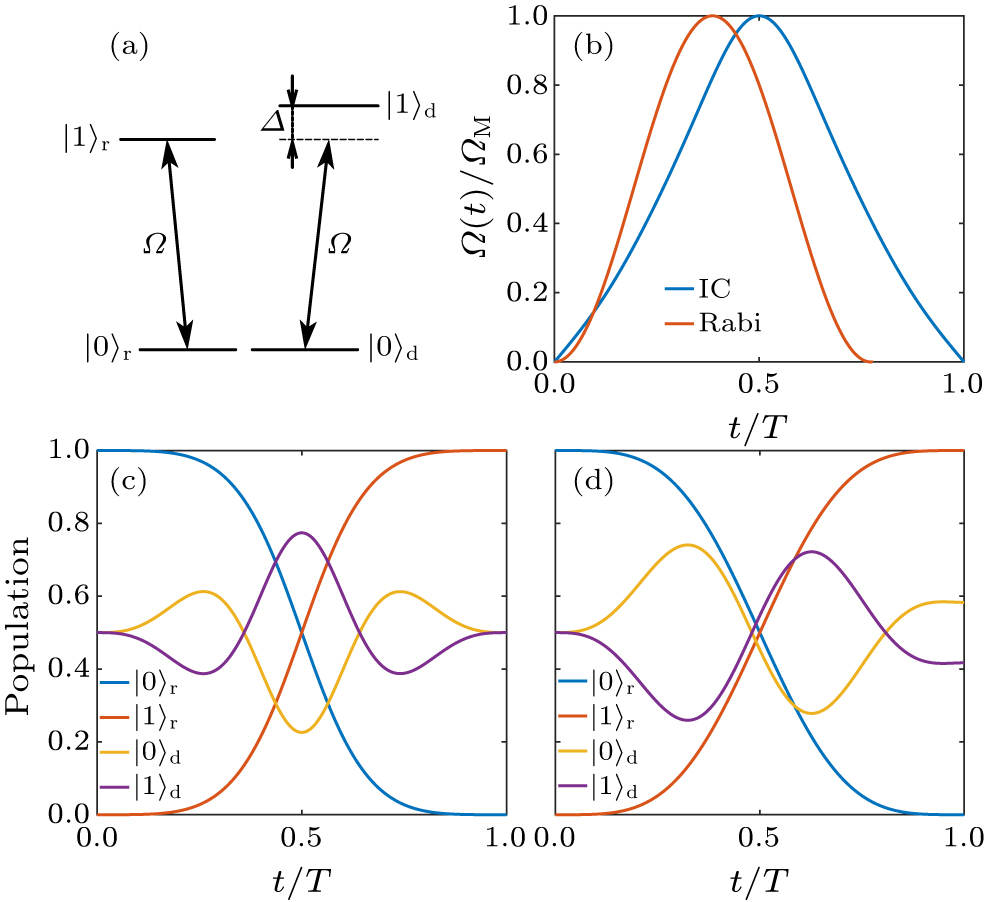
Furthermore, another application of our solution is the ability to achieve precise control over both the target subspace and the nearby subspace. This allows for using one pulse to control two subspaces individually. Specifically, in the target subspace, a resonant Rabi process is implemented by designing the Rabi rate Ω(t) and the phase φ. The integral area of
Now, we show the example to obtain individual controlling. The choice is ζ(0) = ζ(T) = π/4 with free φ(t), it can implement arbitrary phase gates, as shown in Fig. 1. The corresponding evolution operator is
Since the phase ξ depends on ζ(t), we can design ζ(t) to implement a desired phase gate. For example, an identity gate can be obtained when ξ = π. We show numeral simulations of the case, in which implementing an individual control consists of a NOT gate in the resonant subspace and a phase gate in the detuned subspace, described in Fig. 4. Moreover, for the situation φ = 0, another choice of ζ(t) can be used, it is ζ(0) = ζ(T) = π/6. It implements a rotation gate around the axis σx in the resonant subspace and a gate determined by the value of ξ in the nearby detuned subspace. The corresponding evolution operator is
If we design ζ(t) to satisfy ξ(T) = π and ensure
3.1. Gate operation in semiconductor qubits
3.2. Individual controlling
-
In conclusion, we present an analytical-assisted solution of the time-dependent Schrödinger equation for a two-level quantum system under driving, with few limitations. We show the details of the analytical progress and present some concrete examples to demonstrate its application in quantum control, i.e., deriving smooth pulse for the gate operation in ST qubit systems and individual control over two transitions with nearby frequencies.
Further exploration in the field may be the following. First, this solution could also take the gate robustness into account by choosing different free parameters. Second, it is important to extend the study to higher-level systems, such as three-level systems, which can be used to model superconducting transmon qubits. This involves incorporating new operators specific to three-level systems and reproducing the theoretical derivations. Finally, the results presented here can also be extended to open quantum systems. By employing the Lindblad equation to simulate the density matrix, we ensure that the dynamics we obtain remain valid.
 DownLoad:
DownLoad: